Как настроить Haas Cobot Шаг за шагом — Haas Automation, Inc.
Алекс расскажет нам о том, как запрограммировать полную настройку деталей на Haas HC10 Cobot.
Haas HC10 — это полностью интегрированный робот для совместной работы весом 10 кг, работающий по принципу «подключай и работай», предназначенный для станков Haas. Система полностью управляется системой управления Haas, подключенной к электрическому интерфейсному блоку машины.
Наши комплекты Cobot оснащены 6-осевым модулем cobot, программным интерфейсом для прямого управления с помощью станка Haas, обучающей подвеской и контроллером cobot, защитной световой завесой и всем необходимым электрическим оборудованием для непосредственного взаимодействия с системой управления Haas.
——————————
Как настроить Haas Cobot Шаг за шагом — Haas Automation, Inc.
00:01 Введение и подготовка
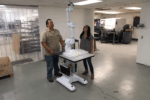
• Алекс из HAS показывает, как настроить нового робота HDT для загрузки материала и запуска деталей.
• Робот уже подключён к станку, установлены световые завесы и стол для деталей.
• Перед автоматизацией необходимо убедиться в стабильности процесса и возможности работы с несколькими деталями без присмотра.
01:12 Настройка станка и тисков
• Регулировка губок тисков HAS Air для надёжного закрепления материала.
• Проверка ширины открытия губок для облегчения загрузки деталей.
01:38 Настройка безопасности робота
• Вход в обучающий пульт робота с именем пользователя и паролем «адмен».
• Выбор уровня безопасности от 0 до 5, где 0 — самый чувствительный и безопасный, а 5 — наименее чувствительный режим.
• Уровень 3 выбран для работы с закрытой световой завесой, максимальная скорость — 60 дюймов в секунду.
03:19 Программирование робота на панели управления
• Подключение панели управления к роботу.
• Установка максимальной скорости робота и массы захватов.
• Настройка выходов захватов и задержки зажима.
06:35 Управление роботом
• Управление роботом с помощью пульта дистанционного управления и обучающего пульта.
• Использование кнопок осей и ползунка скорости для перемещения робота.
• Включение режима свободного управления на обучающем пульте.
09:33 Настройка рамок
• Настройка рамок для инструментов и пользовательских рамок.
• Обновление позиций по умолчанию для лучшей адаптации к установке.
• Определение центральной точки захвата и измерение расстояний до новых позиций.
11:26 Создание пользовательских рамок
• Создание пользовательских рамок для стола с деталями и станка.
• Исправление мировой рамки по умолчанию для точного совпадения с шаблоном деталей.
• Метод трёх точек для более точной настройки пользовательских рамок.
12:12 Настройка рамки стола с деталями
• Использование метода трёх точек для установки точки отсчёта.
• Выравнивание пальца захвата робота по углу квадрата сетки.
• Проверка параллельности плоскости стола с деталями.
13:01 Создание и активация рамки
• Перемещение робота в дальнее место шаблона сетки.
• Выравнивание пальца захвата по квадрату шаблона для задания положительного направления по осям X и Y.
• Активация созданной рамки нажатием F2.
14:00 Начало программирования
• Переход на вкладку «Автоматически загрузчик деталей».
• Создание нового задания и заполнение таблицы на вкладке «Шаблон».
• Выбор простой последовательности и методов захвата и опускания деталей.
15:10 Настройка параметров шаблона
• Определение количества строк и столбцов деталей.
• Измерение расстояния между квадратами сетки с помощью штангенциркуля.
• Отключение последовательности переворота деталей.
16:40 Настройка загрузки деталей
• Проверка активности рамок и нейтрального положения робота.
• Настройка высоты захвата над столом.
• Сохранение положения захвата для загрузки тисков.
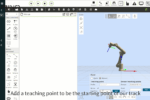
18:33 Программирование движения готовности
• Создание файла движения от точки над столом к позиции перед станком.
• Настройка параметров движения: координаты шарнира, начальная скорость, рамки.
• Запуск файла движения в обратном и прямом направлениях для проверки.
21:25 Настройка движения загрузки сырья
• Переключение на пользовательскую систему координат стола станка.
• Вставка материала в тиски и проверка его положения.
• Настройка скорости и запись точек для загрузки сырья.
23:37 Завершение настройки
• Изменение смещения G54 для соответствия положению загрузки материала.
• Запуск программы резки или замена сырья готовой деталью.
• Проверка точности загрузки готовой детали с помощью штангенциркуля.
24:05 Создание движения для выгрузки детали
• Использование пневматических тисков для удержания готовой детали.
• Применение высокоскоростных движений суставов для приближения к детали.
• Проверка окончательного положения детали при зажатии и разжатии тисков.
24:59 Тестирование движения и замена захвата
• Запуск файла движения вперёд и назад для проверки гладкости и отсутствия столкновений.
• Запись движения для замены захвата: зажим детали, разжим тисков, подъём тисков и замена захвата.
25:26 Настройка движения для замены захвата
• Использование захвата, рамы инструмента и пользовательской рамы стола.
• Установка скорости 1 дюйм в секунду.
• Запись положения робота и поворот захвата с помощью сустава шесть.
26:28 Очистка от стружки
• Возможность настройки воздушного потока для очистки тисков от стружки.
• Важность включения вентилятора или промывки охлаждающей жидкостью при работе с автоматизированной деталью.
27:03 Загрузка после замены
• Настройка робота для загрузки необработанного материала в тиски после замены захвата.
• Повторное использование точек из файла движения для загрузки необработанного материала.
31:03 Создание движения для выгрузки детали
• Начало с нажатия F1, установка скорости 1 дюйм в секунду.
• Проверка рамы инструмента и пользовательской рамы.
• Запись положения робота и вывод его из станка.
33:16 Проверка программы
• Переход на страницу запуска задания и проверка несохранённых изменений.
• Использование двухстрочной программы для тестирования файла движения.
• Наблюдение за работой робота и проверка загрузки детали в тиски.
36:51 Запуск задания
• Сброс программы робота на странице восстановления.
• Управление захватами и тисками, возврат робота в исходное положение.
• Привязка программы резки ЧПУ к заданию для робота.
• Запуск программы после раскладки деталей на шаблоне.