Настройка конечной нагрузки робота FAIRINO
### Резюме
Видео демонстрирует пошаговую настройку конечной нагрузки (end load) для робота FR, включая ручной ввод веса и центра масс, переименование нагрузки, автоматическую идентификацию с использованием вертикального положения и записью начальной позиции.
### Основные моменты
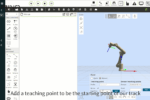
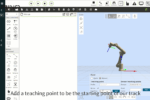
— ⚙️ **Выбор и настройка нагрузки:** В интерфейсе начальной настройки выберите «Payload» и выберите «End Payload», затем задайте вес и координаты центра масс для инструмента на конце.
— 📝 **Редактирование и переименование нагрузки:** Можно выбрать вторую нагрузку, задать новое имя (например, «test load»), ввести вес и координаты центра масс, либо очистить данные.
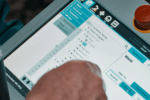
— 🤖 **Автоматическая идентификация нагрузки:**
— Перейдите в интерфейс мультиосевого соединения.
— Установите робота в вертикальное положение.
— Включите автоматический режим.
— Запишите начальную позицию.
— Выполните идентификацию с пустой нагрузкой, затем с установленной.
— После завершения — получите результаты.
— ✅ **Завершение настройки:** После выполнения всех шагов настройка конечной нагрузки считается успешной.
### keyword
`FR Robot` `Payload Setting` `Automation`